Object Localization
Classification VS. Localization VS. Detection
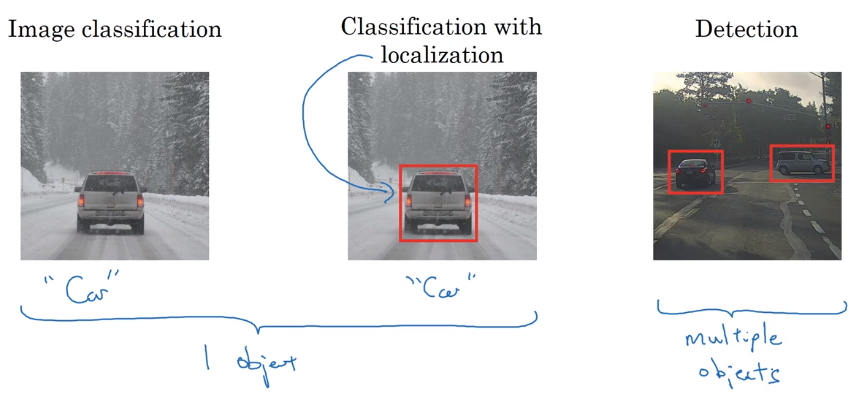
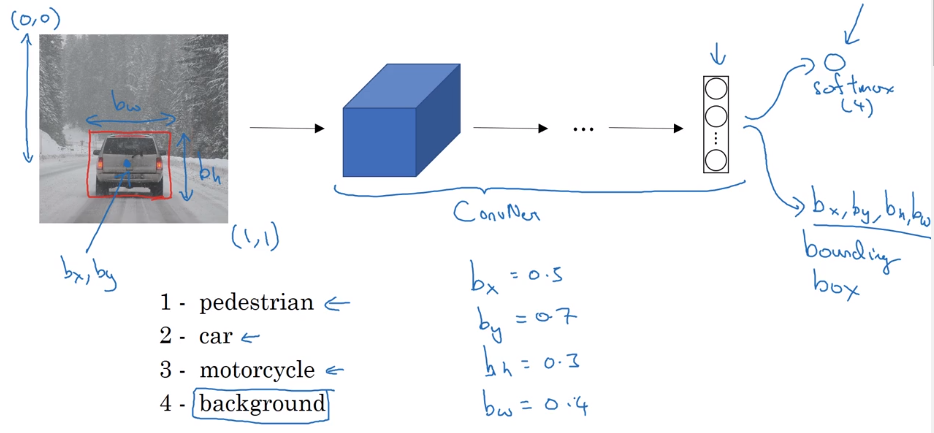
classification with localization
Apart from softmax output (for classification), add 4 more outputs of bounding box: b_x, b_y, b_h, b_w.
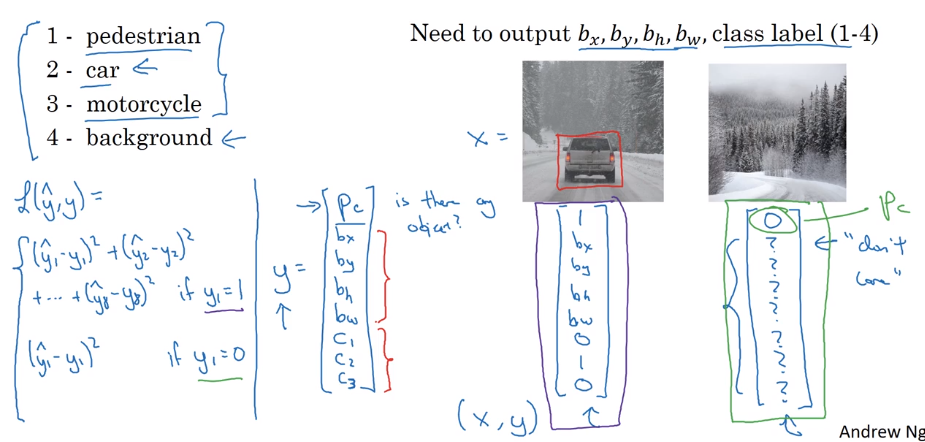
Defining target label y in localization
label format:
P_c indicating if there's any object
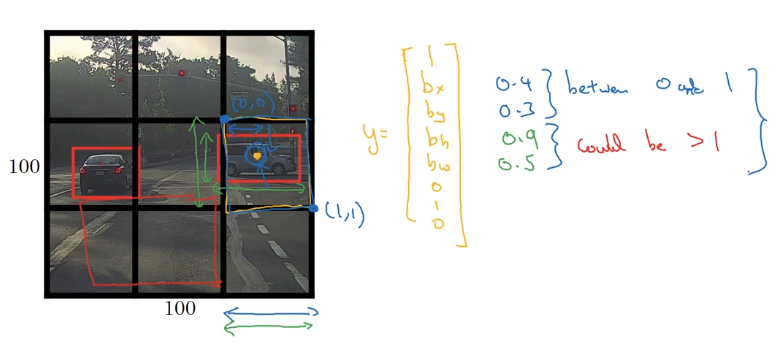
bounding box: b_x, b_y, b_h, b_w
class proba: c_1, c_2, c_3
Loss function: squared error
if y_1=P_c=1: loss = square error (y, y_hat)
if y_1=P_c=0: loss = (y_1 - y_1_hat)^2
can use different loss function for different components, but sq-loss works in practice.
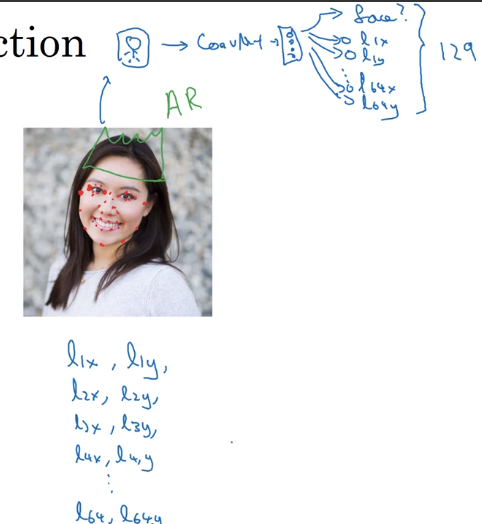
Landmark Detection
"landmark": important points in image. → let NN output their coords.
e.g. recognize coord of eye's corner or points along the eye/nose/mouth
→ specify a number of landmarks
Object Detection
sliding windows detection
example: car detection.
training image: closely-croped image
in prediciton: use sliding window and pass to ConvNet; use window of different size.
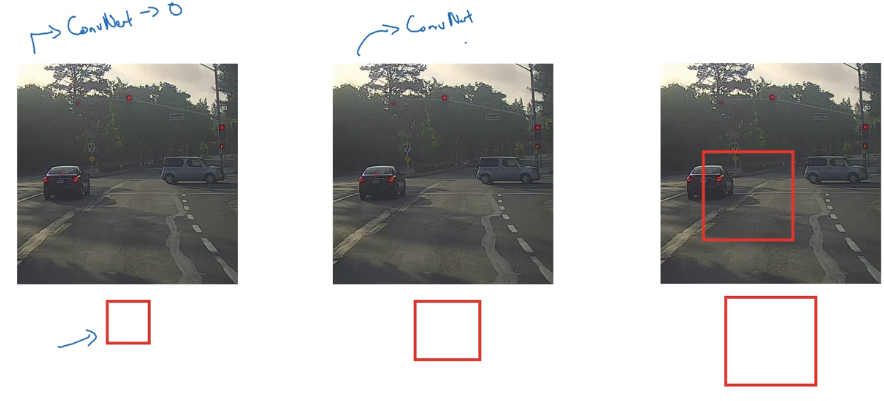
Sliding window is OK with pre-DL algos.
disadvantage: computation cost too high — each window's crop ran independently through ConvNet.
→ sliding window also can be implemented "convolutionally" — some computation can be cached.
Convolutional Implementation of Sliding Windows
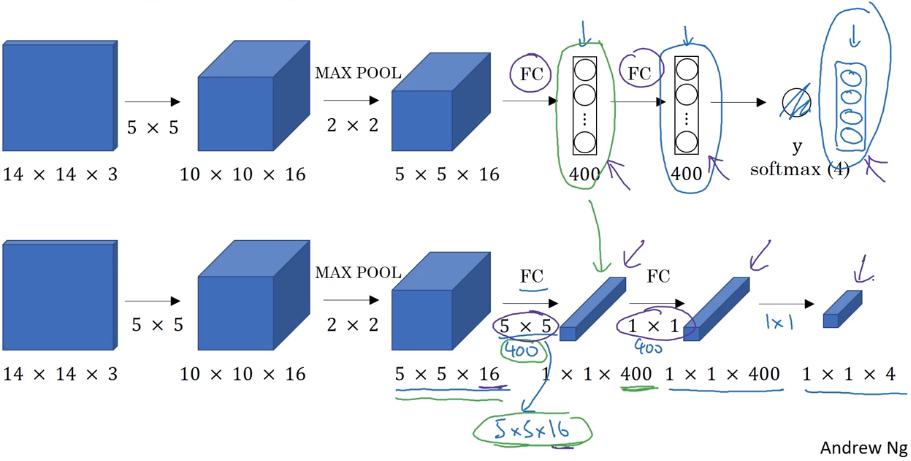
Turning FC layer into conv layers
example: last conv/maxpool layer: size=55
→ replace FC(output_dim=400) by 400 55 filters
→ replace next FC layer by 11 filters
→ replace softmax layer by 11 filters and activation.
conv implementation of sliding window

example: training image 14143, testing image 16163
instead of corping image to 1414 and feed to ConvNet, feed the larger picture directly to ConvNet*.
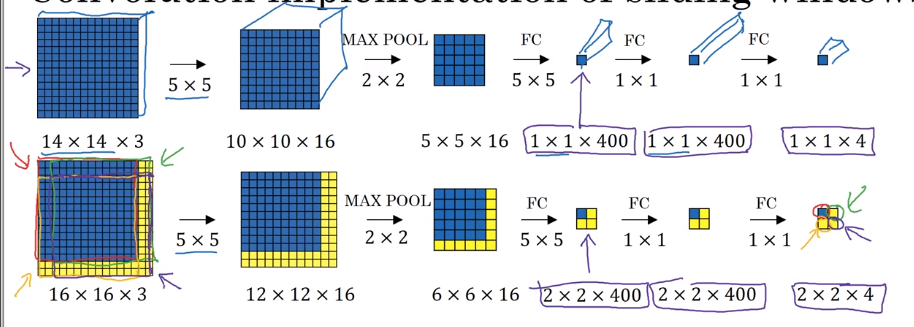
→ output contains results of all patches!
⇒ instead of computing each sliding window sequentially, can get all results with a single pass of the full image!!
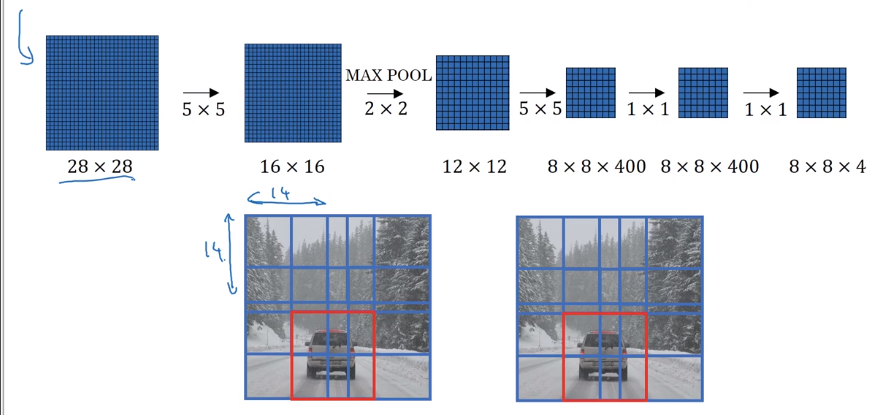
problem: bounding box position is not accurate.
Bounding Box Predictions
To output more accurate bounding boxes: aspect-ration no longer 1:1.
YOLO algorithm

"You Only Look Once"
For each grid cell: apply image classification with bouding boxes (described in 1st section, 8 outputs).
needs labelled data: assign each obj to the grid where its center is in.
output volume: 338
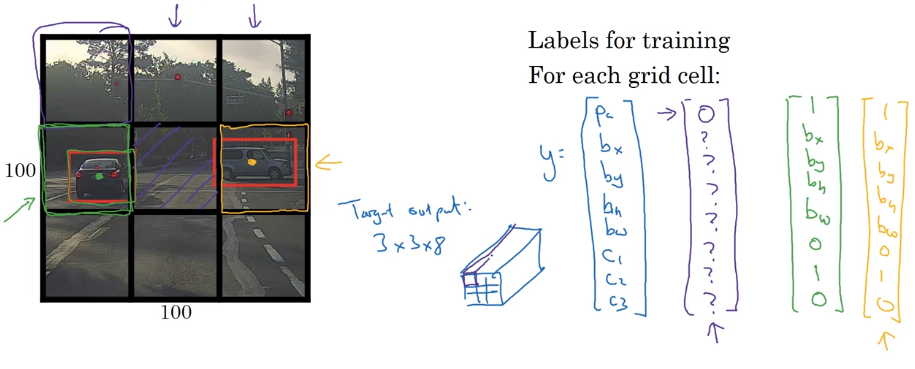

Also: a lot of computation shared, efficient ⇒ possible to do real-time.
note: bounding box annotation in YOLO can be out of [0,1] range.
Intersection Over Union
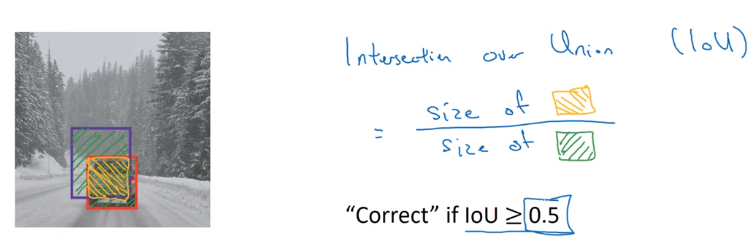
Evaluating object localization:
→ intersection over union (IoU) function = size(intesection) / size(union) = measure of overlap of two bounding boxes.
"correct" if IoU >= 0.5
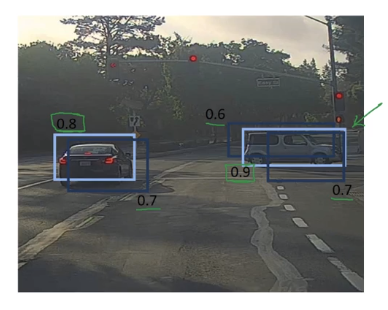
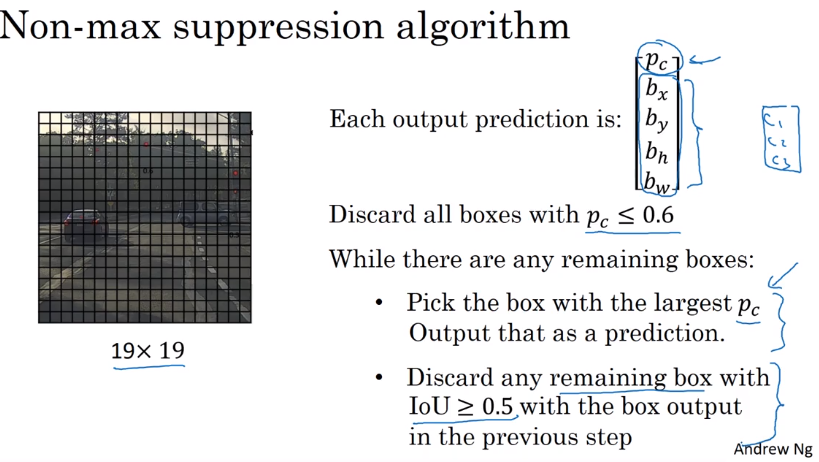
Non-max Suppression
Problem: algo might detect the same obj multiple times.
example:
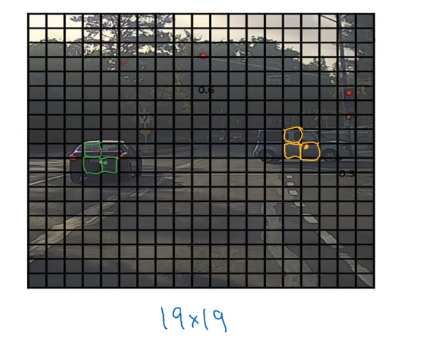
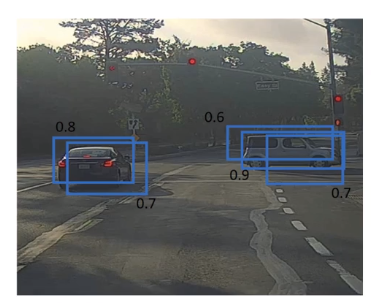
each bouding box has a confidence score — keep the max bouding box, suppress the overlapping ones.
Anchor Boxes
Problem: each grid detects only one obj → can a grid detect multiple obj ? → use anchor boxes.
In data labeling: predefine 2 shapes (anchor boxes); use 8 sets of 8 outputs for each anchor box.
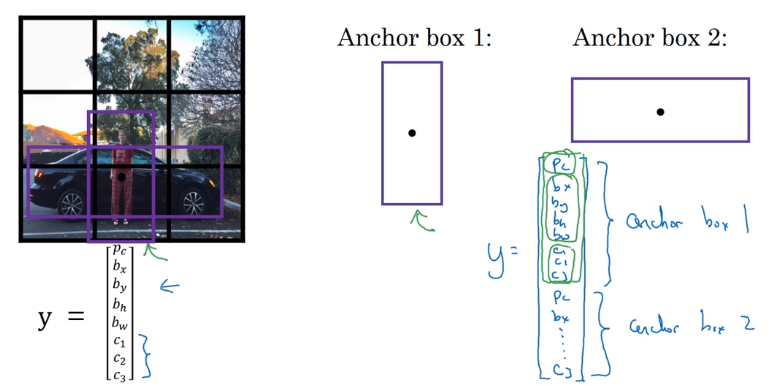
Compare with previous:
- previous: each obj assigned to the grid which contains its mid point
- now each obj assigned to (cell, anchorbox): cell=the grid which contains its mid point; anchor_box= the anchorbox that has highest IoU with the labelled bounding box.
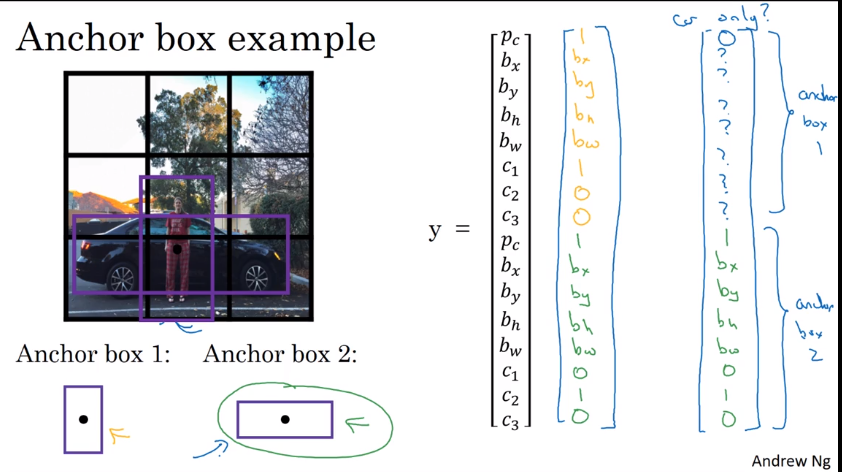
In practice: choose 5~10 anchor boxes by hand; or use Kmeans on object's shapes.
YOLO Algorithm
Put all components together.
example:
- detecting pedestrian/car/motercycle. (4 classes)
- grid: 3*3
- 2 anchor boxes
→ Preparing training set
y shape = 3*3*2*8
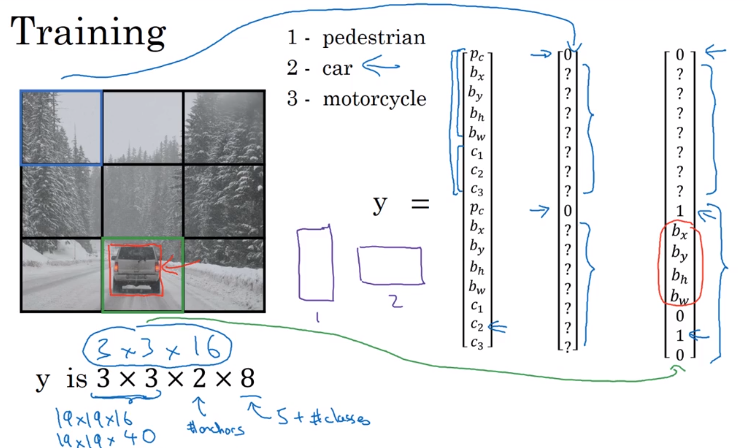
train a ConvNet on this with output_dim = 3316
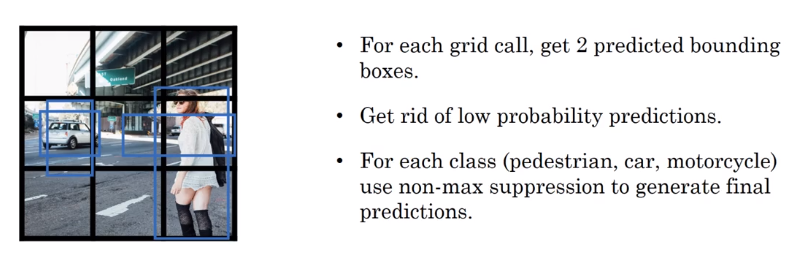
→ making predictions
2*8 outputs for each of the 9 grids
→ nonmax supression for each class
(Optional) Region Proposals

Region proposal algo (R-CNN): less often than YOLO.
Sliding window disadvantage: many regions are not interesting.

⇒ select just a few windows
first run segmentation algo, then run CNN on bounding box of blobs.
→ still quite slow
faster variants:

Part 12 of series «Andrew Ng Deep Learning MOOC»:
- [Neural Networks and Deep Learning] week1. Introduction to deep learning
- [Neural Networks and Deep Learning] week2. Neural Networks Basics
- [Neural Networks and Deep Learning] week3. Shallow Neural Network
- [Neural Networks and Deep Learning] week4. Deep Neural Network
- [Improving Deep Neural Networks] week1. Practical aspects of Deep Learning
- [Improving Deep Neural Networks] week2. Optimization algorithms
- [Improving Deep Neural Networks] week3. Hyperparameter tuning, Batch Normalization and Programming Frameworks
- [Structuring Machine Learning Projects] week1. ML Strategy (1)
- [Structuring Machine Learning Projects] week2. ML Strategy (2)
- [Convolutional Neural Networks] week1. Foundations of Convolutional Neural Networks
- [Convolutional Neural Networks] week2. Deep convolutional models: case studies
- [Convolutional Neural Networks] week3. Object detection
- [Convolutional Neural Networks] week4. Special applications: Face recognition & Neural style transfer
- [Sequential Models] week1. Recurrent Neural Networks
- [Sequential Models] week2. Natural Language Processing & Word Embeddings
- [Sequential Models] week3. Sequence models & Attention mechanism
Disqus 留言